

IARC Mission 7

Levi Burner, Aaron Miller, Andrew Saba, Liam Berti
YEARS ACTIVE:
Summer 2016 - Summer 2018
Synopsis
Pitt RAS competed in Mission 7 of the International Aerial Robotics Competition (IARC) in 2017 and 2018. The project was active from June of 2016 through August of 2018. The team developed multiple fully autonomous air vehicles that were entirely custom-built.
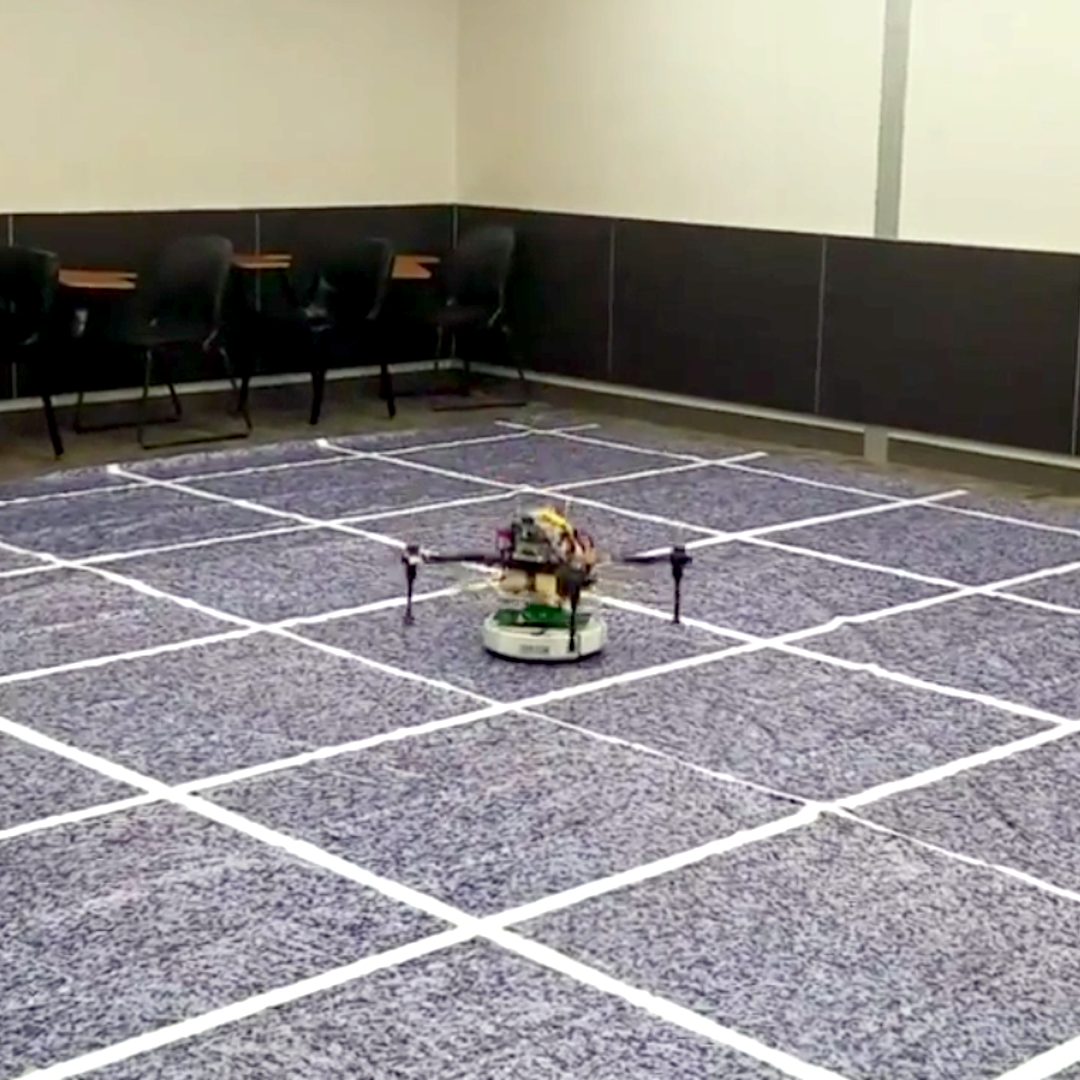
The IARC is an annual competition requiring teams to develop aerial robots that solve problems on the cutting edge of what is currently achievable by any aerial robots, whether owned by industry or governments. Mission 7 involved developing an autonomous drone capable of interacting with randomly moving robots on the ground to direct them towards a goal. Additionally, the drone needed to navigate in an indoor environment without GPS or SLAM, meaning that purely optical methods had to be used.
The team developed complex mechanical, electrical, and software systems in order to achieve its goals. In some aspects, the results surpassed what could be found commercially. For the final technical overview, check out the 2018 Technical Postmortem (it’s full of pictures!).
The following autonomous behaviours were demonstrated on the RAS drone in 2018:
- Autonomous flight
- Localizing and remaining within the arena
- Avoidance of moving obstacles
- Blocking and landing on moving targets (Not demonstrated at competition)
In 2017, the team won the award for Best System Design and achieved the most points at the American venue of the IARC (Georgia Tech). The other awards were Most Innovative Design, Best Technical Paper, Best Presentation, and Best T-Shirt.
In 2018, the team again won Best System Design and achieved the most points at the American venue. Pitt also won the award for Best Technical Paper.
Team Members
All members were undergrads at Pitt except for a few graduate students and some RAS alumni who came back to work on things that helped hone their professional skills. If your name is missing, we apologize, please get a hold of someone on Slack!
Aaron Miller, Adriena Cribb, Andrew Harman, Andrew Lobos, Andrew Saba, Ankit Joshi, Brandon Contino, Caroline Collopy, Conner Babinchak, Dan Gilmour, Elliot Miller, Evan Becker, Garret Sultzbach, Harrison Green, Jack Bartley, Jackie Sharp, Jay Maier, John Mas, Jeff Deely, Kaylene Stocking, Levi Burner, Liam Berti, Liam Rethore, Matt Belding, Matt Bilker, Nathan Todd, Patrick Snyder, Quentin Torgerson, Quinnan Gill, Ritesh Misra, Sridhar Reddy Velagala, Zach Egolf, Zac Yu
Papers, Posters, and Presentations
2016 First Meeting Presentation
2017 IARC Symposium Presentation
2017 IARC Symposium Paper
2017 Project Poster
2017 First Meeting Presentation
2018 PAAV Summit Poster
2018 IARC Symposium Presentation
2018 IARC Symposium Paper (Won Best Technical Paper)
Photo and Video Galleries
Click on a gallery for more pictures

Posts
IARC Mission 7 Technical Postmortem 2018
IARC Mission 7 Technical Postmortem 2017
Review of Slamtec RPLIDAR A2 on NVIDIA Jetson
Review of KDE Direct propulsion system
Pitt RAS wins Best System Design at IARC 2017
IARC7 Update June 13 2017
IARC7 Update November 27 2016
IARC7 Landing Gear Design Update November 27 2016
Newsletter October 2016: IARC 7