

News Feed
Review of KDE Direct propulsion system
For our 5kg custom autonomous quadrotor built over the past year, we used KDE Direct ESCs, motors, and props. Specifically, we designed our propulsion system to provide approximately 10kg of thrust using the following combination:
- 515Kv, 535W Brushless Motors (KDE2814XF-515)
- 35A ESCs (KDEXF-UAS35)
- Triple-bladed 12.5x4.3 Carbon Fiber propellers (KDE-CF125-TP)
The ESCs were fantastic and incredibly responsive. The synchronous rectification and regenerative braking features do feed large transients back into the system, but the only problem this caused occured when we had a connection (external to KDE’s electronics) between our control electronics and our motor power system. We were able to diagnose the problem with KDE’s help, and adding an opto-isolation barrier completely solved any problems.
The motors were also very reliable and well-constructed. We had one extremely bad crash from approximately 15m which broke the bearings on one motor, but they have otherwise been good....
Pitt RAS wins Best System Design at IARC 2017
We are happy to announce that one of our teams competed at the American Venue of the International Aerial Robotics Competition last week, and won an award for Best System Design. Although no team was able to fully complete the mission, we did achieve the highest overall score out of all the teams at the American Venue.
A brief slide presentation summarizing our design can be found here. A more thorough description of the successes and flaws in our approach will be posted on this website shortly.
IARC7 Update June 13 2017
The University of Pittsburgh’s IARC Mission 7 team is glad to announce that we have graduated from version 0.1 to v1.0 of our hardware stack. With only a few weeks remaining until the Mission date, we are in the midst of our final hardware and software tests. Changes to the quadrotor include stronger motors, carbon fiber propellers and structural rods, a Jetson TX2 computer, and a multitude of cameras and sensors. The v1.0 update did not come without some challenges, and some details of our inital plans for v1.0 were modified as new information came to light. Initial testing proved that v1.0 is capable of autonomous take off, landing, and height holding. Autonomous translation tests and roomba tracking tests are scheduled to be completed by the hardware stack soon. 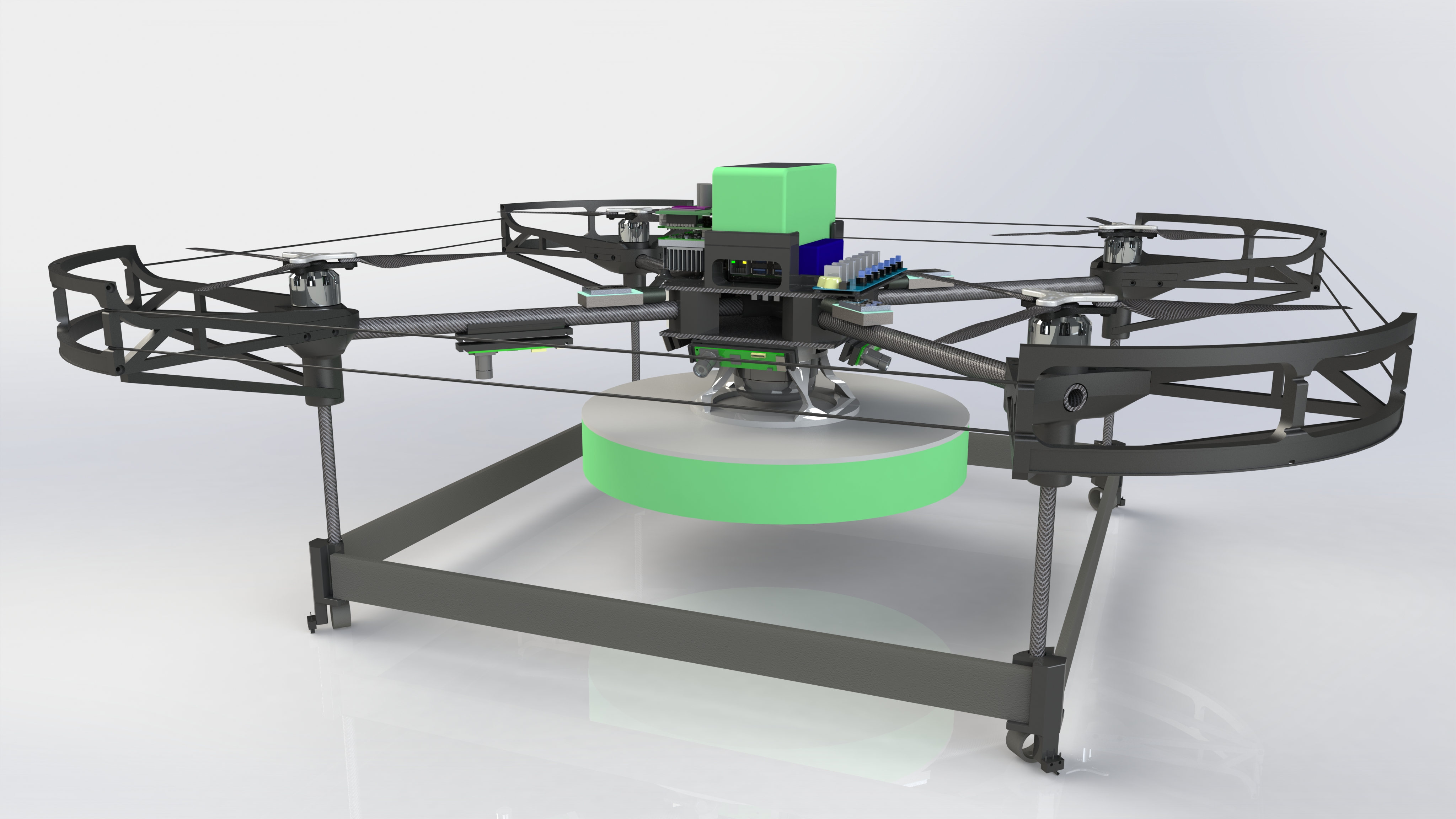
IARC7 Article
For in depth information concerning the methodology of v1.0’s construction and software design,...